こんにちは。HoloLensチームの髙木です。
今回の記事のテーマは、HoloLens2によるロボット操作です。
弊社では昨年度、CEATEC2019・国際ロボット展2019にてHoloLens1と7軸協働ロボットによるゴミ分別のデモを展示しました。
※ HoloLens1と7軸協働ロボットによるデモについてはこちらをご覧ください。
今回はHoloLens2のハンドインタラクション機能を利用して、Universal Robots社のUR3eという6軸ロボットを操作してみました。
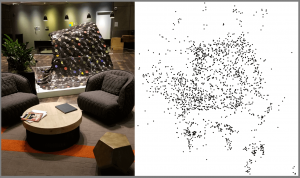
・ロボット実機とHoloLens2で表示したホログラムのロボットとの間で姿勢情報が同期されている様子です。
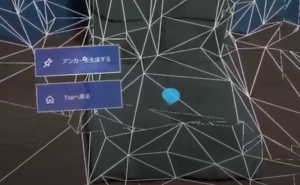
・ハンドインタラクションで直感的に移動先を指定したり、直線移動をアシストする機能を検証中です。
引き続き、ロボット向けのMRデバイス活用について検証を行ってゆきます。
アップデートがあれば、随時投稿してゆきますのでお楽しみに!